实验环境配置#
本节我们将完成实验环境配置并成功运行 rCore-Tutorial-v3。根据您的需求和操作系统,我们提供了多种配置方式,支持大多数 Linux 发行版、macOS、Windows 以及部分 RISC-V 开发板。
配置步骤依赖关系:
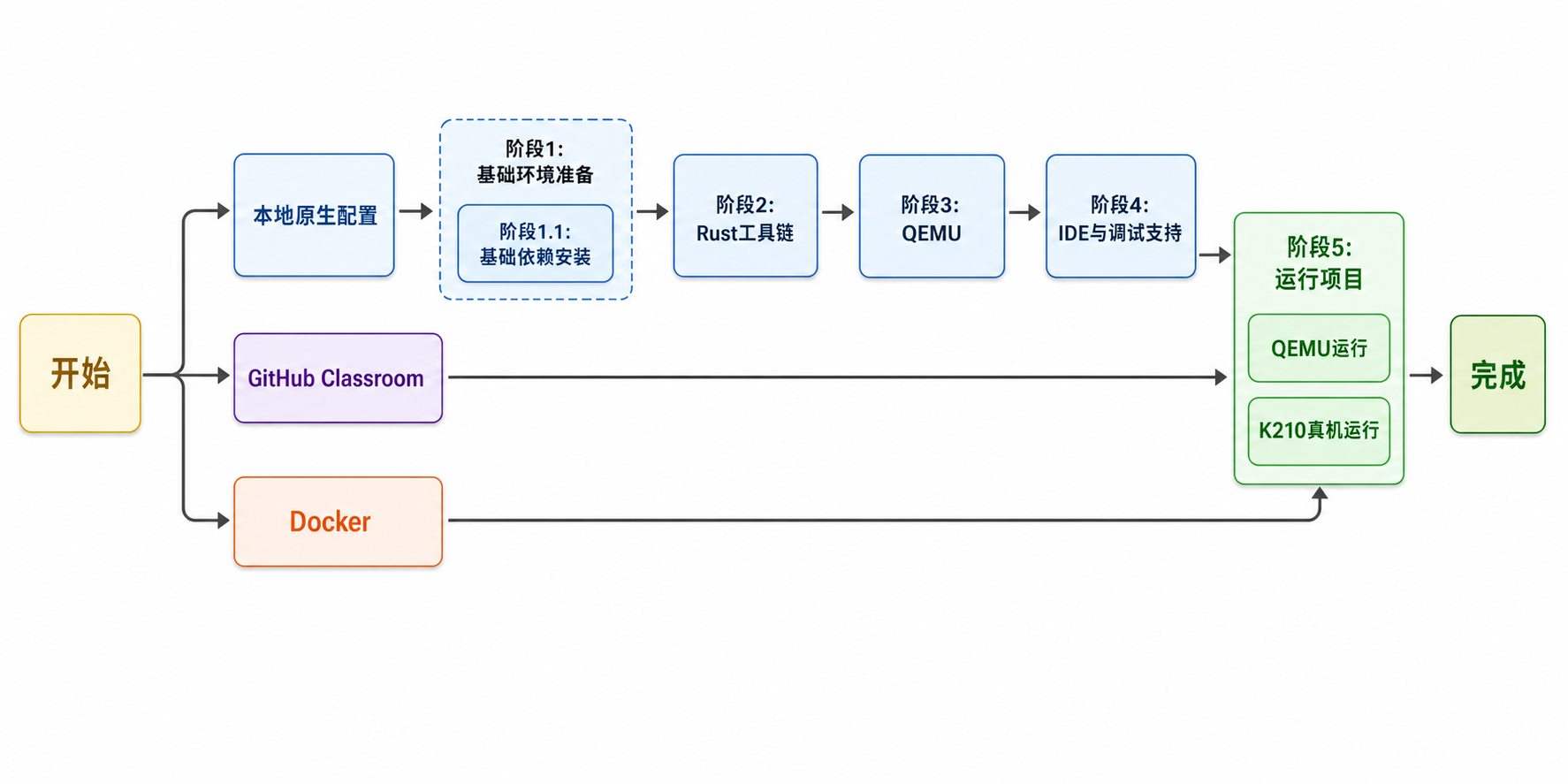
请从 阶段1: 基础环境准备 开始阅读,根据您的实际情况选择适合的配置方案。
阶段1: 基础环境准备#
本节提供多种环境配置方案,请根据您的实际情况选择一种:
GitHub Classroom 线上环境 —— 仅需浏览器,全平台通用
Docker 快速通道 —— 容器化环境,开箱即用
本地原生配置 —— 在本地安装Linux环境进行开发
其中 GitHub Classroom 和 Docker 方式配置完成后可直接进入 阶段5: 运行项目;选择本地原生配置则需要继续完成 阶段1.1: 基础依赖安装 → 阶段2: Rust 工具链 → 阶段3: QEMU → 阶段4: IDE与调试支持 → 阶段5: 运行项目
GitHub Classroom 线上环境(全平台通用)#
基于 github classroom,可方便建立开发用的 git repository,并可基于 github 的 codespace(在线版 ubuntu + vscode)在线开发使用。整个开发环境仅仅需要一个网络浏览器。
注解
注:这种方式目前主要用于 2022年开源操作系统训练营
适用场景:
不想配置本地环境
网络条件良好
快速开始实验
任何操作系统
配置步骤:
在网络浏览器中用自己的 github id 登录 github.com
接收 第一个实验练习 setup-env-run-os1 的github classroom在线邀请,根据提示一路选择OK即可。
完成第二步后,你的第一个实验练习 setup-env-run-os1 的 github repository 会被自动建立好,点击此 github repository 的链接,就可看到你要完成的第一个实验了。
在你的第一个实验练习的网页的中上部可以看到一个醒目的
code绿色按钮,点击后,可以进一步看到codespace标签和醒目的create codesapce on main绿色按钮。请点击这个绿色按钮,就可以进入到在线的ubuntu +vscode环境中再按照下面的环境安装提示在 vscode 的
console中安装配置开发环境:rustc,qemu 等工具。注:也可在 vscode 的console中执行make codespaces_setenv来自动安装配置开发环境(执行sudo需要root权限,仅需要执行一次)。重要: 在 vscode 的
console中执行make setupclassroom_testX(该命令仅执行一次,X的范围为 1-8)配置 github classroom 自动评分功能。然后就可以基于在线 vscode 进行开发、运行、提交等完整的实验过程了。
上述的3,4,5步不是必须的,你也可以仅仅基于 Github Classroom 生成 git repository,并进行本地开发。
状态: ✅ 环境配置完成 —— 直接进入 阶段5: 运行项目
Docker 快速通道(全平台通用)#
适用场景:
已安装 Docker Desktop
希望完全隔离的开发环境
不想手动编译 QEMU
任何操作系统
注解
Docker 开发环境
感谢 qobilidop,dinghao188 和张汉东老师帮忙配置好的 Docker 开发环境,进入 Docker 开发环境之后不需要任何软件工具链的安装和配置,可以直接将 tutorial 运行起来,目前仅支持将 tutorial 运行在 QEMU 模拟器上。
使用方法如下(以 Ubuntu18.04 为例):
通过
su切换到管理员账户root(注:如果此前并未设置root账户的密码需要先通过sudo passwd进行设置),在rCore-Tutorial-v3根目录下,执行make build_docker,来建立基于docker的开发环境;在
rCore-Tutorial-v3根目录下,执行make docker进入到 Docker 环境;进入 Docker 之后,会发现当前处于根目录
/,我们通过cd mnt将当前工作路径切换到/mnt目录;通过
ls可以发现/mnt目录下的内容和rCore-Tutorial-v3目录下的内容完全相同,接下来就可以在这个环境下运行 tutorial 了。例如cd os && make run。
状态: ✅ 环境配置完成 —— 直接进入 阶段5: 运行项目
本地原生配置#
选择本地原生配置后,根据您的操作系统或硬件环境选择具体方案:
Windows WSL2 —— Windows 内置虚拟机(推荐)
Windows VMware —— 传统虚拟机方案
macOS VMware/Parallels —— Mac 虚拟机方案
macOS 原生配置 —— 在macOS上直接配置开发环境
Linux 原生配置 —— 如当前安装的系统为 Ubuntu、OpenEuler、龙蜥操作系统等 linux 发行版,可直接安装依赖
RISC-V 硬件环境 —— RV64硬件模拟或真机环境(适合hacker尝试)
无论选择哪种方案,后续都需要完成 阶段1.1: 基础依赖安装 → 阶段2: Rust 工具链 → 阶段3: QEMU → 阶段4: IDE与调试支持 → 阶段5: 运行项目
Windows - WSL2(推荐)
对于Windows10/11 的用户可以通过系统内置的 WSL2 虚拟机(请不要使用 WSL1)来安装 Ubuntu 18.04 / 20.04 。步骤如下:
升级 Windows 10/11 到最新版(Windows 10 版本 18917 或以后的内部版本)。注意,如果不是 Windows 10/11 专业版,可能需要手动更新,在微软官网上下载。升级之后,可以在 PowerShell 中输入
winver命令来查看内部版本号。「Windows 设置 > 更新和安全 > Windows 预览体验计划」处选择加入 “Dev 开发者模式”。
以管理员身份打开 PowerShell 终端并输入以下命令:
# 启用 Windows 功能:"适用于 Linux 的 Windows 子系统" >> dism.exe /online /enable-feature /featurename:Microsoft-Windows-Subsystem-Linux /all /norestart # 启用 Windows 功能:"已安装的系统虚拟机平台" >> dism.exe /online /enable-feature /featurename:VirtualMachinePlatform /all /norestart # <Distro> 改为对应从微软应用商店安装的 Linux 版本名,比如:`wsl --set-version Ubuntu 2` # 如果你没有提前从微软应用商店安装任何 Linux 版本,请跳过此步骤 >> wsl --set-version <Distro> 2 # 设置默认为 WSL 2,如果 Windows 版本不够,这条命令会出错 >> wsl --set-default-version 2
在微软商店(Microsoft Store)中搜索并安装 Ubuntu18.04 / 20.04。
下一步: 进入 WSL Ubuntu 终端,跳转到 阶段1.1: 基础依赖安装
Windows - VMware Workstation
适用场景: WSL2不可用或需要完整GUI
下载预配置镜像:
VMware 中新建虚拟机,在设置虚拟磁盘的时候选择下载的
vmdk格式的虚拟磁盘文件即可登录信息: 用户名
oslab,密码为一个空格。它已经安装了中文输入法和作为 Rust 集成开发环境的 Visual Studio Code,能够更容易完成实验并撰写实验报告
如果想要使用 VMWare 安装 openEuler 虚拟机的话,可以在 openEuler官网 下载 ISO 自行安装,接着需要参考网络上的一些教程配置网络和安装图形界面。
下一步: 进入虚拟机终端,跳转到 阶段1.1: 基础依赖安装
macOS - VMware Fusion / Parallels
下载预配置 Ubuntu 镜像 (同 Windows VMware 镜像)
导入虚拟机并启动
下一步: 进入虚拟机终端,跳转到 阶段1.1: 基础依赖安装
macOS - 原生配置
适用场景: 不想使用虚拟机,直接在macOS上配置开发环境
macOS用户也可以直接在原生系统上配置开发环境,无需安装Linux虚拟机。macOS基于Unix,很多Linux工具都有对应的macOS版本或替代方案。
安装 Homebrew(如未安装):
/bin/bash -c "$(curl -fsSL https://raw.githubusercontent.com/Homebrew/install/HEAD/install.sh)"
安装基础依赖:
brew install git curl wget python3 ninja-build \
pkg-config glib pixman openssl automake libtool
注:macOS上的开发环境与Linux略有不同,但Rust工具链和QEMU的安装步骤基本一致,部分命令(如包管理相关命令)可能需要灵活调整。
下一步: 安装好基础依赖后,跳转到 阶段1.1: 基础依赖安装
Linux - 原生配置
目前实验内容可支持在 Ubuntu操作系统、openEuler操作系统、龙蜥操作系统 等上面进行操作。
下一步: 直接在本地终端执行 阶段1.1: 基础依赖安装
RISC-V 硬件环境
目前已经出现了可以在RISC-V 64(简称RV64)的硬件模拟环境(比如QEMU with RV64)和真实物理环境(如全志哪吒D1开发板、SiFive U740开发板)的Linux系统环境。但Linux RV64相对于Linux x86-64而言,虽然挺新颖的,但还不够成熟,已经适配和预编译好的应用软件包相对少一些,适合hacker进行尝试。如果同学有兴趣,我们也给出多种相应的硬件模拟环境和真实物理环境的Linux for RV64发行版,以便于这类同学进行实验:
注:后续的配置主要基于Linux for x86-64系统环境,如果同学采用Linux for RV64环境,需要自己配置。不过在同学比较熟悉的情况下,配置方法类似且更加简单。可能存在的主要问题是,面向Linux for RV64的相关软件包可能不全,这样需要同学从源码直接编译出缺失的软件包。
下一步: 完成环境配置后,跳转到 阶段1.1: 基础依赖安装
阶段1.1: 基础依赖安装(WSL/VMware/Linux/macOS共用)#
适用场景:
WSL2 Ubuntu 环境
VMware Ubuntu 虚拟机
本地 Linux 系统
macOS 原生环境(Homebrew)
C 开发环境配置#
在实验或练习过程中,也会涉及部分基于C语言的开发,可以安装基本的本机开发环境和交叉开发环境。下面是以Ubuntu 20.04为例,需要安装的C 开发环境涉及的软件:
$ sudo apt-get update && sudo apt-get upgrade
$ sudo apt-get install git build-essential gdb-multiarch qemu-system-misc gcc-riscv64-linux-gnu binutils-riscv64-linux-gnu
注:上述软件不是Rust开发环境所必须的。且ubuntu 20.04的QEMU软件版本低,而本书实验需要安装7.0以上版本的QEMU。
下一步: 继续到 阶段2: Rust 工具链安装
阶段2: Rust 工具链安装(必需)#
首先安装 Rust 版本管理器 rustup 和 Rust 包管理器 cargo,这里我们用官方的安装脚本来安装:
curl --proto '=https' --tlsv1.2 -sSf https://sh.rustup.rs | sh
如果通过官方的脚本下载失败了,请检查设备/命令行环境网络状况,也可以在浏览器的地址栏中输入 https://sh.rustup.rs 来下载脚本,在本地运行即可。
如果官方的脚本在运行时出现了网络速度较慢的问题,可选地可以通过修改 rustup 的镜像地址(修改为中国科学技术大学的镜像服务器)来加速:
export RUSTUP_DIST_SERVER=https://mirrors.ustc.edu.cn/rust-static
export RUSTUP_UPDATE_ROOT=https://mirrors.ustc.edu.cn/rust-static/rustup
curl --proto '=https' --tlsv1.2 -sSf https://sh.rustup.rs | sh
或者使用tuna源来加速 参见 rustup 帮助:
export RUSTUP_DIST_SERVER=https://mirrors.tuna.edu.cn/rustup
export RUSTUP_UPDATE_ROOT=https://mirrors.tuna.edu.cn/rustup/rustup
curl --proto '=https' --tlsv1.2 -sSf https://sh.rustup.rs | sh
安装完成后,我们可以重新打开一个终端来让之前设置的环境变量生效。我们也可以手动将环境变量设置应用到当前终端,只需要输入以下命令:
source $HOME/.cargo/env
接下来,我们可以确认一下我们正确安装了 Rust 工具链:
rustc --version
可以看到当前安装的工具链的版本。
rustc 1.x.y
警告
目前用于操作系统实验开发的 rustc 编译器使用 stable 类型的版本。项目根目录下的 rust-toolchain.toml 会指定具体工具链配置,请保持其与原版仓库对应分支一致。
可通过如下命令安装 rustc 的 stable 版本,并把该版本设置为 rustc 的缺省版本。
rustup install stable
rustup default stable
我们最好把软件包管理器 cargo 所用的软件包镜像地址 crates.io 也换成中国科学技术大学的镜像服务器来加速三方库的下载。我们打开(如果没有就新建) ~/.cargo/config 文件,并把内容修改为:
[source.crates-io]
registry = "https://github.com/rust-lang/crates.io-index"
replace-with = 'ustc'
[source.ustc]
registry = "git://mirrors.ustc.edu.cn/crates.io-index"
同样,也可以使用tuna源 参见 crates.io 帮助:
[source.crates-io]
replace-with = 'tuna'
[source.tuna]
registry = "https://mirrors.tuna.tsinghua.edu.cn/git/crates.io-index.git"
接下来安装一些Rust相关的软件包
rustup target add riscv64gc-unknown-none-elf
cargo install cargo-binutils
rustup component add llvm-tools-preview
rustup component add rust-src
警告
如果你换了另外一个 rustc 编译器,需要重新安装上述 rustc 所需软件包。rCore-Tutorial 仓库中的 Makefile 包含了这些工具的安装,如果你使用 make run 也可以不手动安装。
下一步: 继续到 阶段3: QEMU 安装
阶段3: QEMU 7.0+ 安装(必需)#
我们需要使用 QEMU 7.0 版本进行实验,低版本的 QEMU 可能导致框架代码不能正常运行。而很多 Linux 发行版的软件包管理器默认软件源中的 QEMU 版本过低,因此我们需要从源码手动编译安装 QEMU 模拟器软件。下面以 Ubuntu 18.04/20.04 上的安装流程为例进行说明:
警告
注意,如果安装了 QEMU 6.0+ 版本,则目前需要将项目目录下的 bootloader(也即 RustSBI)更新为最新的 0.2.0-alpha.6 版本。它们目前可以在 chX-dev 分支中找到。
首先我们安装依赖包,获取 QEMU 源代码并手动编译:
Ubuntu 环境:
# 安装编译所需的依赖包
sudo apt install autoconf automake autotools-dev curl libmpc-dev libmpfr-dev libgmp-dev \
gawk build-essential bison flex texinfo gperf libtool patchutils bc \
zlib1g-dev libexpat-dev pkg-config libglib2.0-dev libpixman-1-dev libsdl2-dev libslirp-dev \
git tmux python3 python3-pip ninja-build
# 下载源码包
# 如果下载速度过慢可以使用我们提供的百度网盘链接:https://pan.baidu.com/s/1dykndFzY73nqkPL2QXs32Q
# 提取码:jimc
wget https://download.qemu.org/qemu-7.0.0.tar.xz
# 解压
tar xvJf qemu-7.0.0.tar.xz
# 编译安装并配置 RISC-V 支持
cd qemu-7.0.0
./configure --target-list=riscv64-softmmu,riscv64-linux-user # 在第九章的实验中,可以有图形界面和网络。如果要支持图形界面,可添加 " --enable-sdl" 参数;如果要支持网络,可添加 " --enable-slirp" 参数
make -j$(nproc)
macOS 环境:
# MacOS qemu环境配置
pip3 install tomli
brew install ninja pkgconfig glib sdl2 cmake
# 下载源码包
# 如果下载速度过慢可以使用我们提供的百度网盘链接:https://pan.baidu.com/s/1dykndFzY73nqkPL2QXs32Q
# 提取码:jimc
wget https://download.qemu.org/qemu-7.0.0.tar.xz
# 解压
tar xvJf qemu-7.0.0.tar.xz
# 编译安装并配置 RISC-V 支持
cd qemu-7.0.0
./configure --target-list=riscv64-softmmu,riscv64-linux-user # 在第九章的实验中,可以有图形界面和网络。如果要支持图形界面,可添加 " --enable-sdl" 参数;如果要支持网络,可添加 " --enable-slirp" 参数
make -j$(sysctl -n hw.ncpu)
# 退出:control+c即可
注解
注意,上面的依赖包可能并不完全,比如在 Ubuntu 18.04 上:
出现
ERROR: pkg-config binary 'pkg-config' not found时,可以安装pkg-config包;出现
ERROR: glib-2.48 gthread-2.0 is required to compile QEMU时,可以安装libglib2.0-dev包;出现
ERROR: pixman >= 0.21.8 not present时,可以安装libpixman-1-dev包。
另外一些 Linux 发行版编译 QEMU 的依赖包可以从 这里 找到。
之后我们可以在同目录下 sudo make install 将 QEMU 安装到 /usr/local/bin 目录下,但这样经常会引起冲突。个人来说更习惯的做法是,编辑 ~/.bashrc 文件(如果使用的是默认的 bash 终端),在文件的末尾加入几行:
# 请注意,qemu-7.0.0 的父目录可以随着你的实际安装位置灵活调整
export PATH=$PATH:/path/to/qemu-7.0.0/build
随后即可在当前终端 source ~/.bashrc 更新系统路径,或者直接重启一个新的终端。
此时我们可以确认 QEMU 的版本:
qemu-system-riscv64 --version
qemu-riscv64 --version
在其他缺少预编译 QEMU with RV64 软件包的Linux x86-64 环境(如openEuler操作系统)上,首先需要从 openEuler 社区维护的 QEMU 的 riscv分支 下载 QEMU 源码,并直接通过 rpmbuild 进行构建。
警告
请尽量不要安装 qemu-kvm,这可能会导致我们的框架无法正常运行。如果已经安装,可以考虑换用 Docker。
另外,我们仅在 Qemu 7.0.0 版本上进行了测试,请尽量不要切换到其他版本。
下一步: 可选组件,跳转到 阶段4: IDE与调试支持 或直接到 阶段5: 运行项目
阶段4: IDE与调试支持#
IDE 配置#
推荐以下集成开发环境(IDE)用于 Rust 开发:
JetBrains CLion + Rust插件
CLion 是 JetBrains 出品的专业 C/C++ IDE,配合 Rust 插件可以提供优秀的 Rust 开发体验
付费商业软件,但学生和教师可在 JetBrains 网站注册账号申请免费使用(约半年期限)
Visual Studio Code
开源免费,推荐使用以下插件:
rust-analyzer:Rust 语言支持
RISC-V Support:RISC-V 汇编支持
其他编辑器
VIM、Emacs 等传统编辑器同样可以用于开发
GDB 调试支持#
目前我们仅支持基于 QEMU 模拟器进行调试。在 os 目录下 make debug 可以调试我们的内核,这需要安装终端复用工具 tmux,还需要支持 riscv64 指令集的 gdb 调试器 riscv64-unknown-elf-gdb。该调试器包含在 riscv64 gcc 工具链中,工具链的预编译版本可以在如下链接处下载:
最新版的工具链可以在 sifive 官方的 repo 中 找到。
解压后在 bin 目录下即可找到 riscv64-unknown-elf-gdb 以及另外一些常用工具 objcopy/objdump/readelf 等。
在其他缺少预编译 riscv64 gcc 工具链的 Linux x86-64 环境(如 openEuler 操作系统、龙蜥操作系统等)上,则需要 clone riscv 工具链仓库 并参考其说明手动构建。
出于某些原因,我们全程使用 release 模式进行构建。为了正常进行调试,请确认各项目(如 os,user 和 easy-fs)的 Cargo.toml 中包含如下配置:
[profile.release]
debug = true
此外,参考 os/Makefile,还可以先打开一个终端页面 make gdbserver 启动 QEMU,此后另开一个终端页面在同目录下 make gdbclient 将 GDB 客户端连接到 QEMU 进行调试。我们推荐使用 gdb-dashboard 插件,可以大大提升调试体验。在本节的评论区已有同学提供了基于各种 IDE 的调试方法,也可参考。
下一步: 阶段5: 运行项目
阶段5: 运行 rCore-Tutorial-v3#
在 QEMU 模拟器上运行#
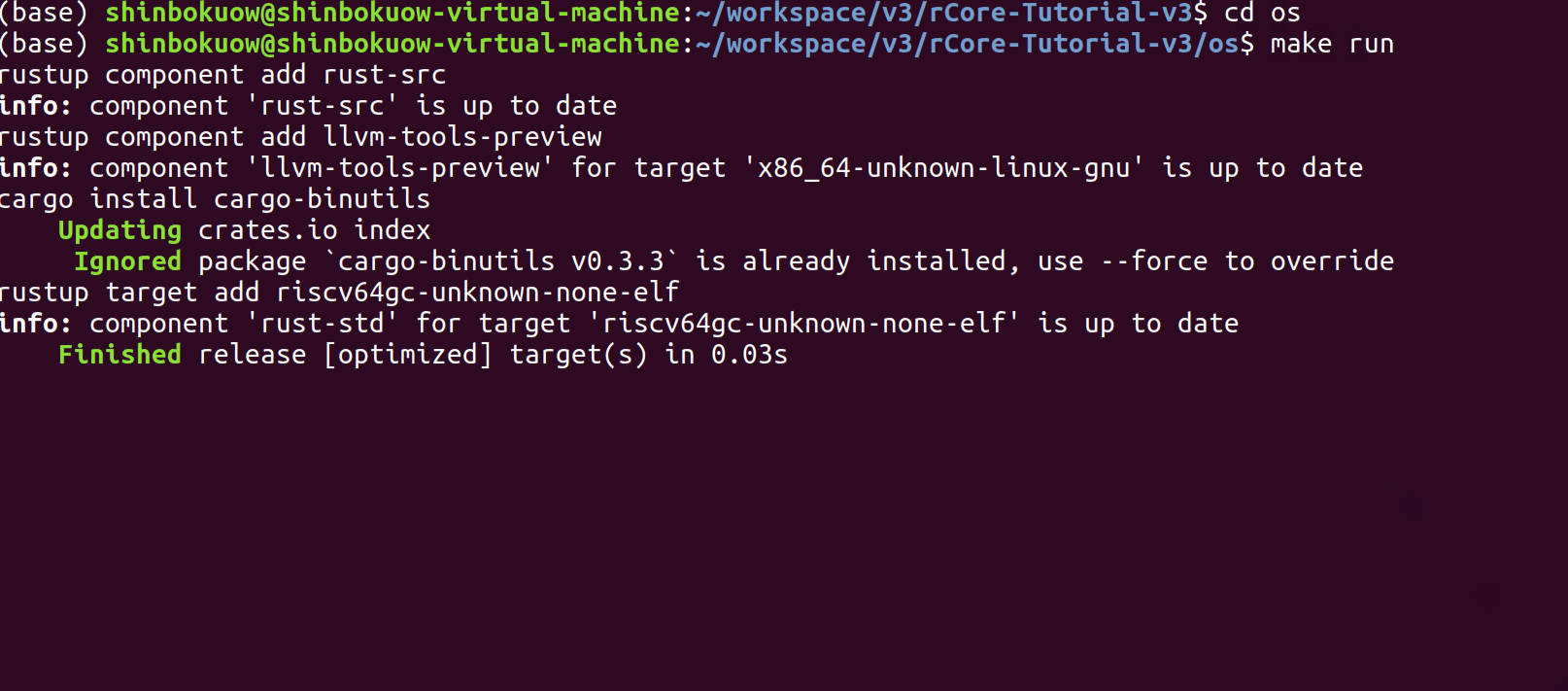
如果是在 QEMU 模拟器上运行,只需在 os 目录下 make run 即可。在内核加载完毕之后,可以看到目前可以用的应用程序。 usertests 打包了其中的很大一部分,所以我们可以运行它,只需输入在终端中输入它的名字即可。
之后,可以先按下 Ctrl+a (即:先按下 Ctrl 不松开,再按下小写字母 a 不放,随后同时将两个键松开),再按下 x 来退出 QEMU。
在 K210 平台上运行#
如果是在 K210 平台上运行则略显复杂。首先需要安装基于 Python 的串口通信库和简易的串口终端:
pip3 install pyserial
sudo apt install python3-serial
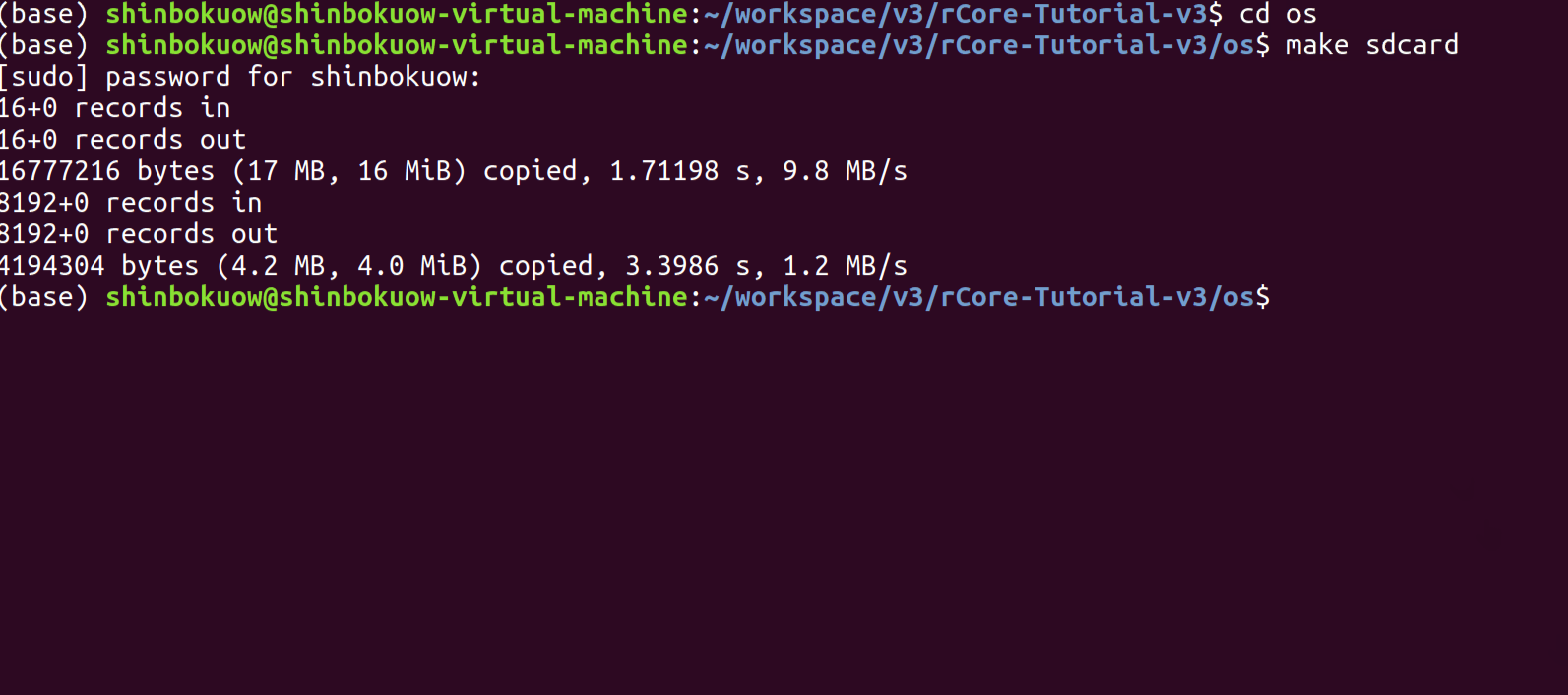
准备 MicroSD 卡
首先,我们需要将 MicroSD 插入 PC 来将文件系统镜像拷贝上去。
警告
在 os/Makefile 中我们默认设置 MicroSD 在当前操作系统中可以用设备 SDCARD=/dev/sdb 访问。你可以使用 df -hT 命令来确认在你的环境中 MicroSD 是哪个设备,并在 make sdcard 之前对 os/Makefile 的 SDCARD 配置做出适当的修改。不然,这有可能导致 设备 /dev/sdb 上数据丢失!
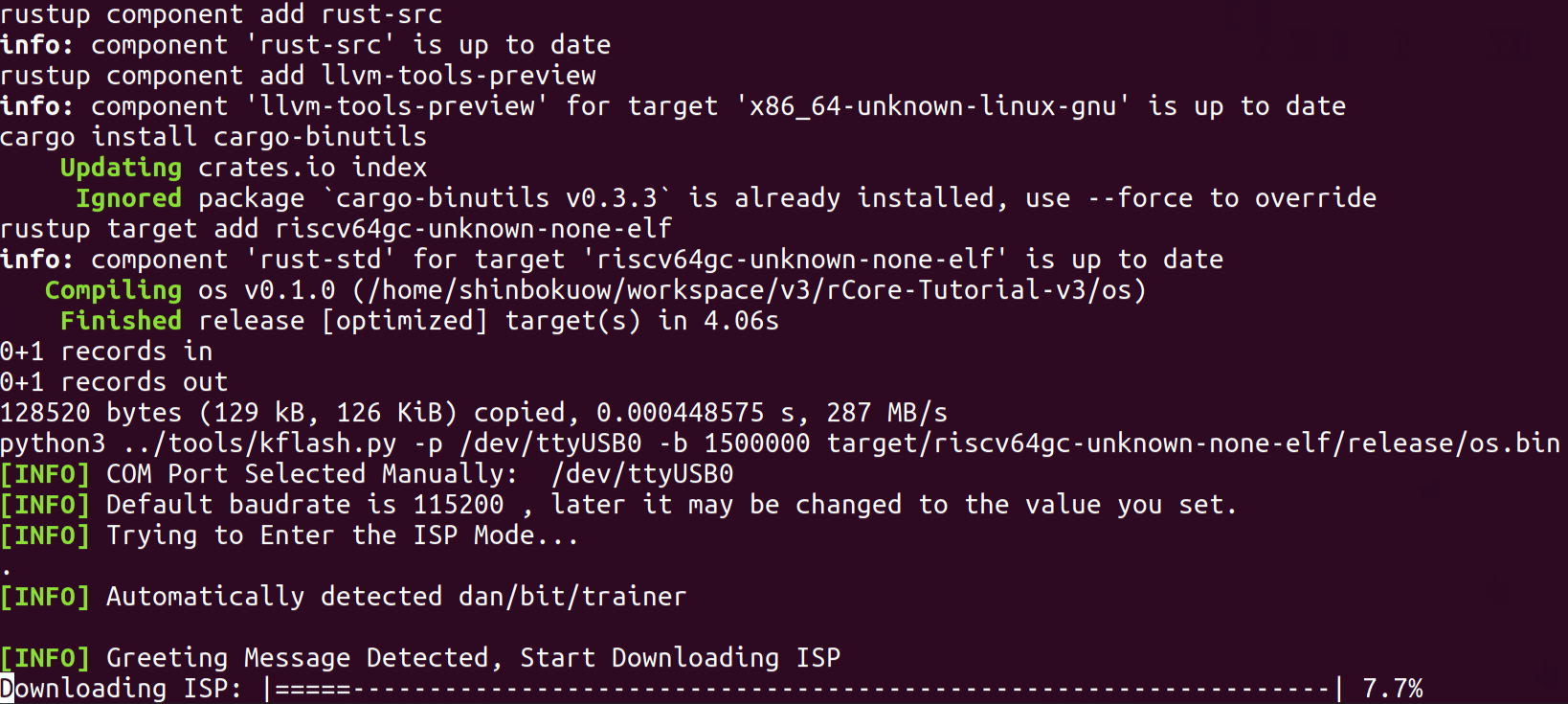
随后,我们将 MicroSD 插入 K210 开发板,将 K210 开发板连接到 PC,然后进入 os 目录 make run BOARD=k210 在 K210 开发板上跑 rCore Tutorial。
之后,可以按下 Ctrl+] 来退出串口终端。
由于教程的 ch1~ch5 分支还没有文件系统,在 K210 上运行这些分支无需 MicroSD 卡也不需要进行文件系统镜像烧写工作,直接切换到 os 目录下 make run BOARD=k210 即可。
到这里,恭喜你完成了实验环境的配置,可以开始阅读教程的正文部分了!
Q & A#
当代码跑不起来的时候,可以尝试:
分支是否与 rCore-Tutorial-v3 原版仓库(而非 fork 出来的仓库)的对应分支同步。如不同步的话考虑通过
git pull进行更新。注:这是因为 Rust 的版本更迭较快,如不及时更新的话曾经能正常运行的代码也会无法运行。项目根目录下的
rust-toolchain非常重要,它代表整个项目采用的 Rust 工具链版本。请务必保持其与原版仓库对应分支一致。项目根目录下是否存在放置 RustSBI 的
bootloader/目录。如不存在的话可从原版仓库的各分支上获取。通过
make clean或者cargo clean删除os或user目录下的构建产物,并重新make run。注:出现这样的问题通常说明框架的构建脚本存在 bug,可以提 issue。
如果怀疑遇到了网络问题,可以检查:
请按照本节说明进行 Rust 安装和 crates.io 镜像配置。通常情况下能够解决 Rust 工具链更新和下载已发布到 crates.io 上库的问题。
如果发现在试图从 github 上下载下述几个库的时候卡死,可以修改
os和user目录下的Cargo.toml替换为 gitee 上的镜像。例如,将:virtio-drivers = { git = "https://github.com/rcore-os/virtio-drivers" } k210-pac = { git = "https://github.com/wyfcyx/k210-pac" } k210-hal = { git = "https://github.com/wyfcyx/k210-hal" } k210-soc = { git = "https://github.com/wyfcyx/k210-soc" }
替换为:
virtio-drivers = { git = "https://gitee.com/rcore-os/virtio-drivers" } k210-pac = { git = "https://gitee.com/wyfcyx/k210-pac" } k210-hal = { git = "https://gitee.com/wyfcyx/k210-hal" } k210-soc = { git = "https://gitee.com/wyfcyx/k210-soc" }