异步通信框架: evering
evering 是受 io_uring 启发的的异步通信框架,作为本文实现异步 IPC 的基石,它
- 🦀 基于 Rust 异步模型
- 🐧 基于共享内存
- 📡 提供双向 SPSC 消息队列
- 🎬 提供灵活的资源管理机制
evering 使用两个单生产者单消费者(SPSC)并发队列进行通信,
1 | Client Server |
受限于 SPSC 通信,目前 evering 只能遵循 thread-per-core 模型,不同于 tokio、async-std 等使用 work-stealing 的运行时.在基于 thread-per-core 的异步模型中,每个线程有一个局部的运行时,不同线程之间保持最小的通信,甚至完全独立.而基于 work-stealing 的异步模型中,任何异步任务都可能由于运行时的调度而被“偷”到其他线程上运行.二者相比有以下异同:
- 在 thread-per-core 模型中,异步任务不必担心同步问题,即在 Rust 中不需要使用诸如
impl Send + Future的类型,这可以大大简化异步编码体验.而在 work-stealing 模型中,几乎所有的异步任务都需要注意线程之间的同步,这样难免会带来一些额外的开销,也使得异步编码更为繁琐^1. - 正如 work-stealing 这名称所示,在此类模型中,运行时会根据程序实时状态对不同线程上的异步任务进行负载均衡,使得每个线程都不会陷入长时间的忙碌或空间.而对于 thread-per-core 模型,由于异步任务不能在多线程之间共享,当处理某个 CPU 密集型任务时,很可能因为长时间阻塞而导致该线程上的其他任务迟迟得不到处理,最终出现较高的响应延迟.因此 thread-per-core 不适合 I/O 密集混合 CPU 密集的场景.
实验性异步 IPC 模型: evering-ipc
evering-ipc 在 evering 的基础上,同时利用 Linux 的共享内存机制实现了异步 IPC.具体而言,要通信的两个进程使用以下所示的共享内存区进行同步:
1 | .-----------------------------------------------------------------------------. |
- [1] 是整个共享内存区的起始,通过 mmap(2) 映射到地址空间中,因此是页对齐的.
- [1] 中包含 evering 的两个通信队列的偏移量,基于这个偏移量配合 evering 提供的构造队列的接口,可以确保两个进程看到的状态是相同的.
- [2] 中包含一个单线程的内存分配器,这个分配器通常由客户端使用.
- [3] 是通信队列的实际所在位置.
- [4] 是其余全部的空闲内存,这些内存由 [2] 中的分配器管理.
在 evering-ipc 中,uring 仅用于传递静态类型且通常仅有十几到几十个字节的消息.而对于更大的以及编译期间无法确定大小的数据,它利用共享的空闲内存来传递.具体而言,
- 客户端获取内存分配器,从中分配合适的内存块,并写入请求体作为待传递数据.
- 客户端将该内存块指针以及其他信息构造成请求头作为消息写入请求队列.
- 服务端接收并解析请求,得到请求头和请求体.
- 服务端处理请求,将处理结果构造响应头作为消息写入响应队列.
- 客户端收到响应,检查结果并执行后续流程.
当服务端同样也需要传响应体作为数据时,有多种思路可以实现:
- 将分配器加锁使它能同时在服务端和客户端使用.对于请求频率特别高的场景,锁可能会降低整体性能.
- 增加一个分配器供服务端使用.对于空闲内存分配比例的设定可能不容易权衡.
- 结合前两个思路,使用两个分配器,但空闲内存加锁,根据程序运行状况动态调整分配给两方的空闲内存.
- 空闲内存完全由客户端管理,在请求时,客户端分配合适大小的内存块供服务端写入响应体.实际中,客户端可能需要预请求一次来确定响应体的大小.
evering-ipc 目前采用第 4 种思路.此外,不难发现,在 evering-ipc 中,数据都是通过指针进行传递的.而在程序运行时,共享内存通常被映射到不同的地址,因此实际传递的是数据块在共享内存中的偏移量.同时,共享内存区的起始地址都是页对齐的,这保证了所有基于相对偏移量得到的地址,即使在两个进程间不同,对齐也是一致的,从而满足 Rust 对不同类型内存布局的要求.
多种 IPC 方案的性能测试: ipc-benchmark
ipc-benchmark 针对多种 IPC 方案进行了关于通信延迟的性能测试,这些方案包括:
- 基于 evering + memfd 的 IPC
- 基于 shmipc + memfd 的 IPC
- 基于 tokio + epoll + UDS 的 IPC
- 基于 tokio + io_uring + UDS 的 IPC
- 基于 monoio + io_uring + UDS 的 IPC
其中,
- memfd 是 create_memfd(2) 创建的匿名内存.
- UDS 是指 Unix Domain Socket.
- shmipc 是基于共享内存的高性能 IPC 框架.
- tokio 是基于 epoll(7) 和 work-stealing 模型的异步 I/O 运行时.
- tokio-uring 为 tokio 提供了基于 io_uring 的异步 I/O 实现.
- monoio 是基于 io_uring 和 thread-per-core 模型的异步 I/O 运行时.
对于每个框架我们采用如下测试方案:
- 启动两个线程作为客户端和服务端.
- 客户端写入
i32的请求头以及大小为buf_size的请求体. - 服务端接收并校验请求头和请求体,随后同样写入
i32的响应头和buf_size大小的响应体. - 客户端接收并校验响应头和响应体.
其中,buf_size 以字节为单位,由 4B 逐渐增长到 4M.
结果对比
详细的性能测试的结果见 https://github.com/loichyan/openoscamp-2025s/tree/ipc-benchmark,下面我们将对该结果进行简略的分析.

此图对比了完整的测试结果,其中 $x$ 轴是上述的 buf_size,而 $y$ 轴则是完成一次测试所需的平均时间.可以看到,随着数据大小的增长 evering 和 shmipc 明显优于其他三者,并且相对于表现最差的 tokio_epoll,二者分别有接近 50% 和 30% 的性能提升.

此图对比了前五个测试的结果,此时数据并不算大,都在通常范围之内.这里能发现相对于另外三者,evering 和 shmipc 都有超过 80% 的性能提升.

此图对比了中间五轮测试的结果,此时数据大小开始逐渐出现大幅度的增长.可以看到,除了 evering 和 shmipc 外的三者针对大块数据的传输并无明显差异.

此图对比了最后五轮测试的结果,此时数据大小已接近极端情况.这里能观察到与第一个对比图同样的结果.
测试结论
单从性能的角度来看,对于上述五种 IPC 方案,evering > shmipc >> monoio > tokio_uring > tokio_epoll.
对比前两者,shmipc 支持 MPSC(多生产者多消费者)的通信方式,而本测试中仅使用 SPSC 的模型进行测试,因此无法发挥其完整的优势.另外,对共享内存处理的方式不同也可能导致了一些性能差异.而对于另外三者,由于使用 UDS 需要将数据在用户空间和内核空间来回拷贝,在面对大块数据时,这将大大降低整体性能.而对于极小的数据块,又由于系统调用等带来的开销,最终需要接近 10 倍的额外时间来完成测试.这一点可以在火焰图^2中体现:
| evering (buf_size=4B) | tokio-epoll (buf_size=4B) |
|---|---|
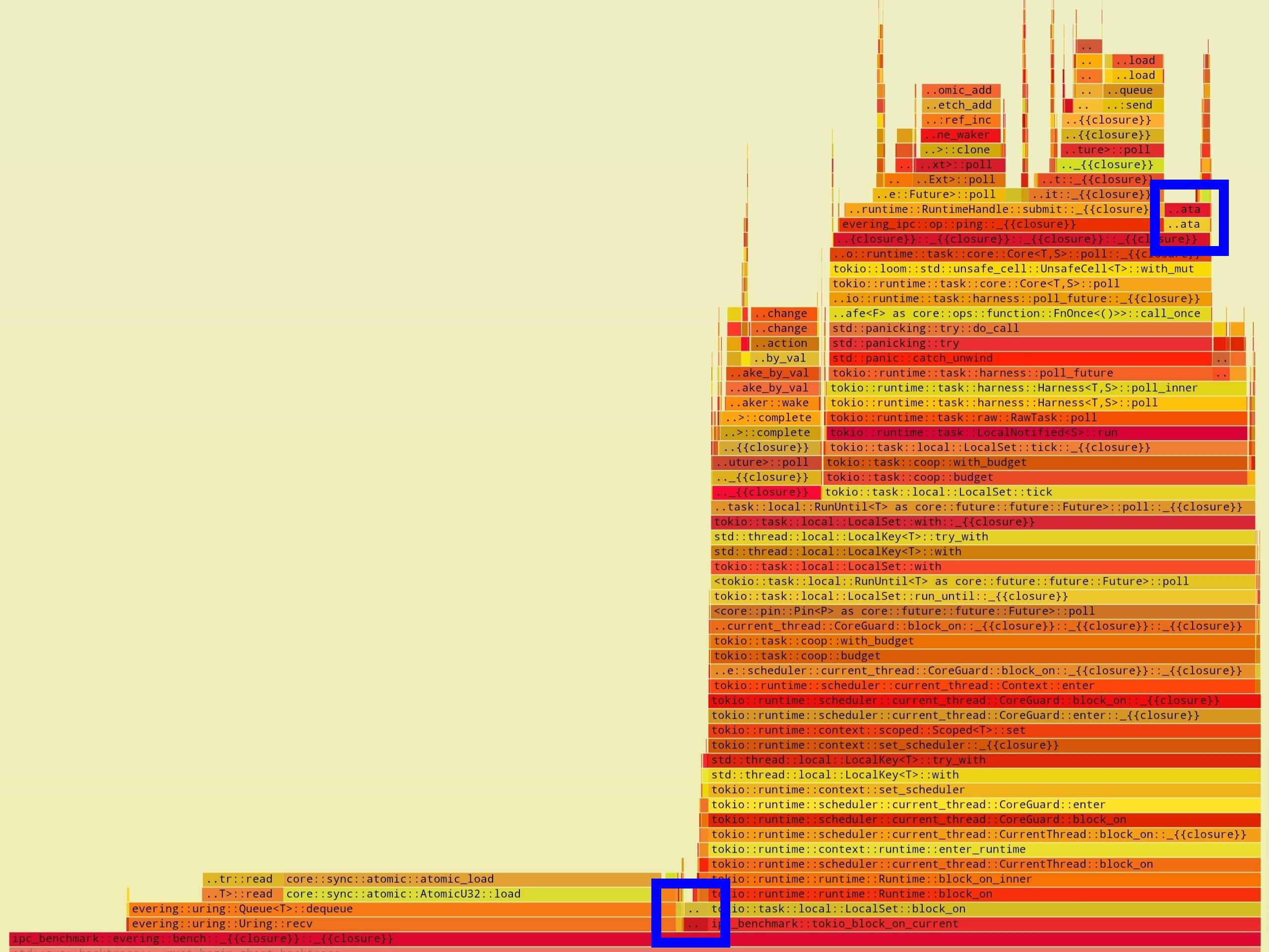 |
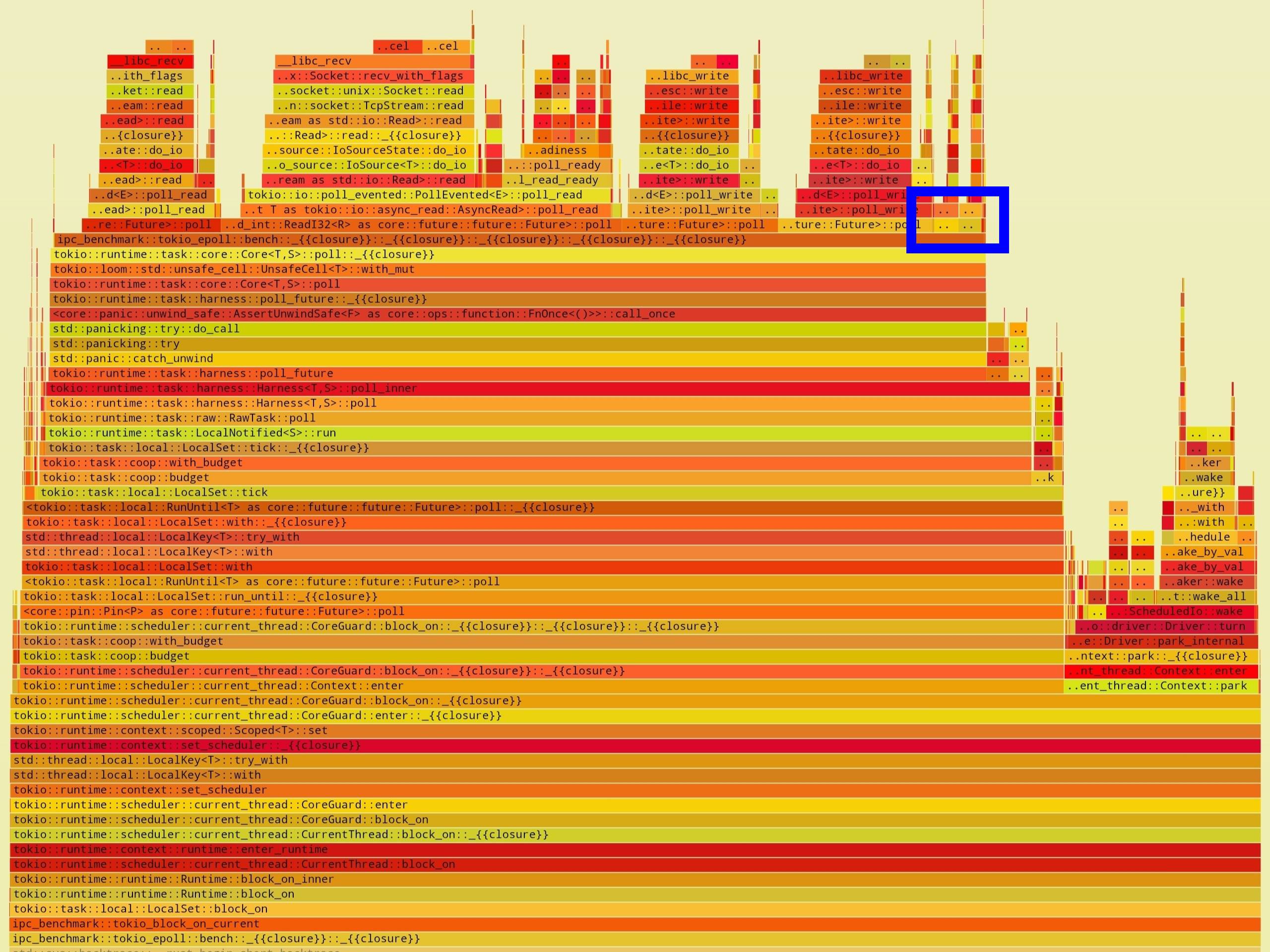 |
此图中展示了在 4B 数据下,性能测试主体函数中各子过程的占比.其中,蓝色高亮部分是校验数据过程,用作参照.不难发现,evering 中主要时间都消耗在传递消息所需的多线程同步上了.而在 tokio-epoll 中则是多个与内核交互的函数调用占用主要时间.在后几轮测试中,当数据变得非常大时,这些消耗则变得无关紧要,此时的性能热点是数据传递引起的内存拷贝.下面的火焰图可以佐证:
| evering (buf_size=4M) | tokio-epoll (buf_size=4M) |
|---|---|
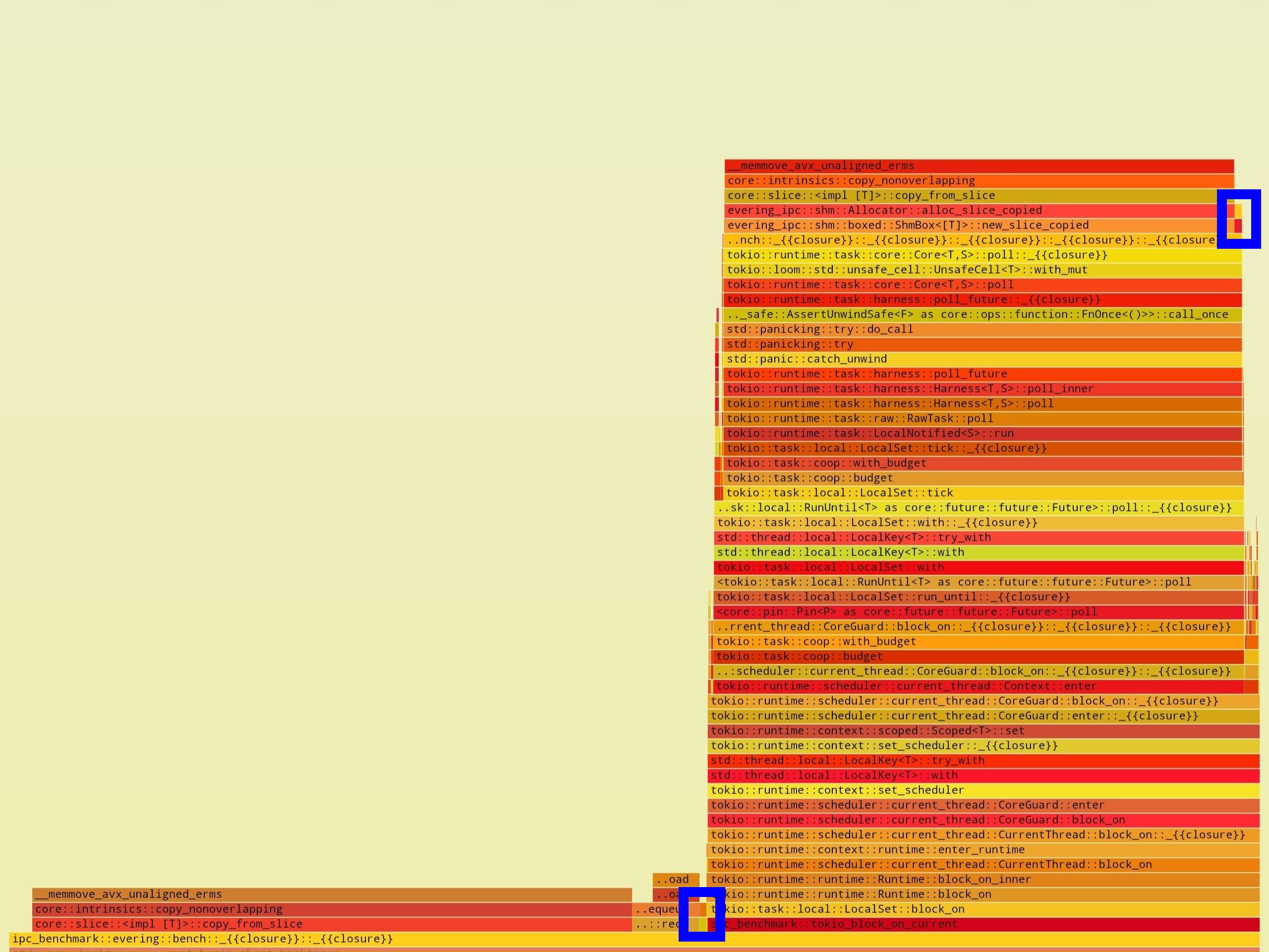 |
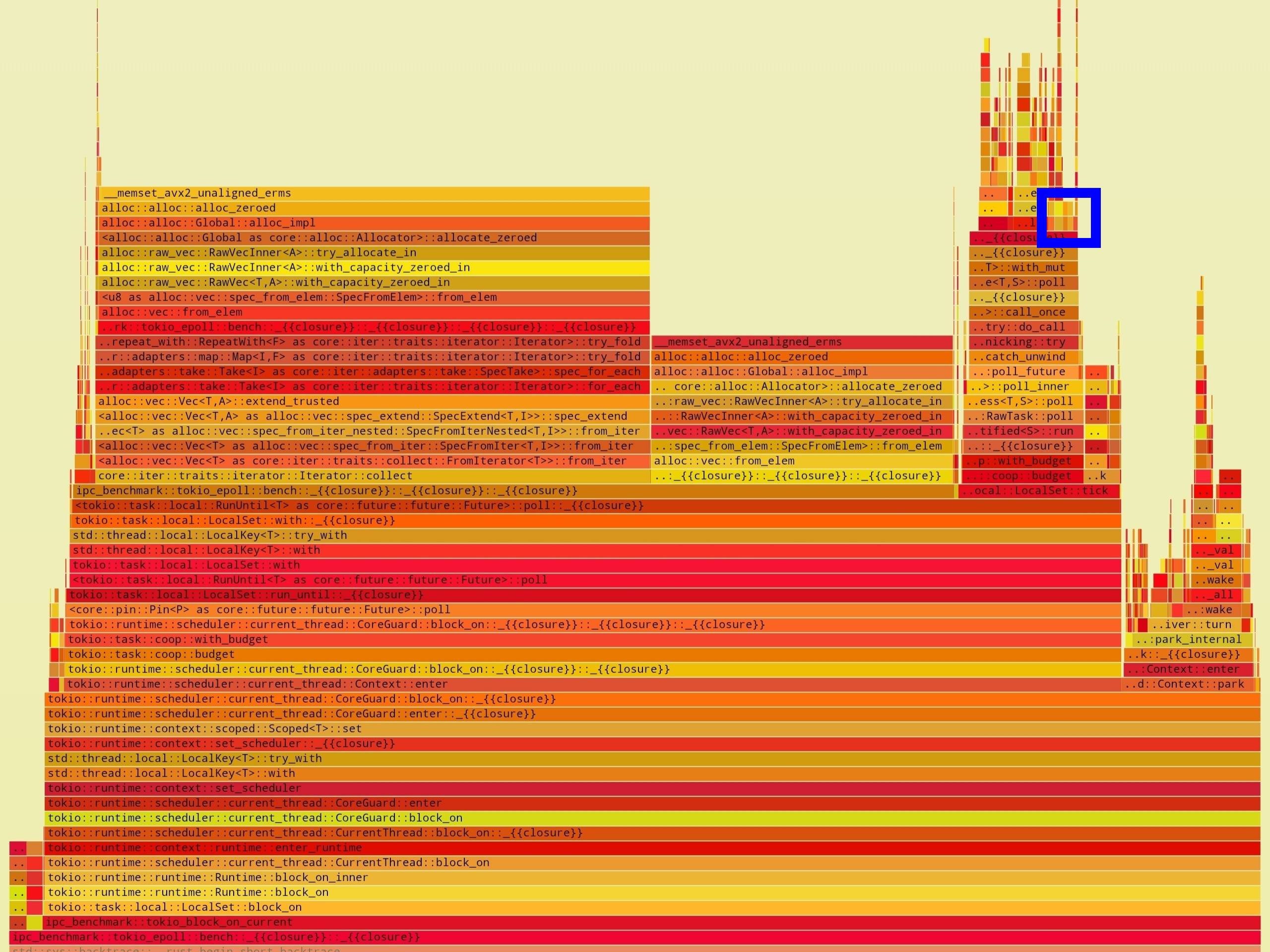 |
此图与上面两个图相同,不过这里的数据大小是 4M.很明显,当数据非常大时,evering 中绝大部分时间用来初始化需要传递的数据,但传递的过程几乎不占用太多时间.而 tokio-epoll 中的情况更加复杂,除了拷贝数据以外,还花费了相当一大部分时间执行内存分配,这些内存用于放置从内核空间传递来的数据.
至于后三者的性能差别,我们猜测主要是由于:
- 设计架构不同,monoio 是单线程的 thread-per-core 模型,因此与我们的测试相性更好.
- 基于 io_uring 实现的异步 I/O 相对于基于 epoll 的,理论上会花费更少的时间在与内核交互上.并且测试中我们利用 io_uring_register(2) 做了进一步的优化,减少了传递小数据时内核处理的开销.
未完成的任务
让 evering 支持 MPSC
正如开头所述,evering 目前只实现了 SPSC 队列,受限于此,不能很好的处理复杂的应用场景.而实现 MPSC 队列之后,客户端就能更好的与 tokio 等运行时协同工作.要实现这个目标,主要是对 evering 的队列结构 RawUring 和操作驱动结构 Driver 进行多线程改造,并且尽可能要实现无锁的数据结构.对于 RawUring 的改造可以参考现有的并发队列实现.而 Driver 底层依赖于 slab::Slab 结构体,因此改造难度稍高.不过,目前 evering 已经支持使用固定大小的 Slab,基于这一点可以大幅降低多线程化的难度.
基于 evering 实现系统调用
evering-ipc 只适用于用户进程之间的通信,而本项目最初的目标是实现用户进程和内核的通信.对于这个目标,除了处理共享内存以外,可能还会遇到页表隔离的问题,以及用户进程意外退出后,对应内核异步任务的清理问题.更长远来看,当实现异步系统调用之后,那么可以将用户进程转彻底换成类似 Rust 中 Future 的无栈协程,从而将开销进一步降低.此外,迁移到异步系统调用时,不可避免的会破坏与现有同步代码的兼容性.因此,实现基于有栈绿色线程的异步系统调用也是一个值得尝试的目标.